A Preliminary Investigation of Copter Drone Detection by using Forward Scattering Radar
Abstract
A global security challenge from the civilian drone usage became alarming. The drone operational flexibility and its inexpensive make its usage on the increase, thus, causing a distressful situation. The vulnerability posed by the exponential increase of the drone gave a reason for its detection. To address the existing threats such as imaging and filming in restricted areas, drug smuggling, transporting contraband items, terror attacks etc., this paper performed a preliminary investigation of how a copter-drone, can be detected by using a forward scattering radar (FSR), a radar with improved feature over the conventional radars. A systematic investigative approach toward achieving this, was followed, these includes; consideration of two different FSR receiver configurations, receiver-target orientation and the polarization effect on the propagated wave and the scattered frequency. The experimental result depicted how a generated micro-Doppler feature due to the rotating blades helps in detecting a copter-drone. The Facing-Rx orientation yielded a more clearly defined feature as compared to the horizontally aligned (Facing-Up) arrangement. For the polarization effect, a horizontal-horizontal (HH) configuration offered more compatibility with the intending target than its counterpart did.
Keywords
Copter-drone, Forward scattering radar (FSR), Micro-Doppler, Detection
Introduction
The forward scatter radar (FSR) system, became a breakthrough as to how best the effect of target's radar cross section (RCS) could be minimized while detection [1]. This is due to its improved features like been counter to stealth technology, low RCS targets detection, high power yield [2] among others, makes it popular especially when dealing with low profile target like the copter-drone. Despites the drone applications in areas like hobbyist, search and rescue, security surveillance [3], the drone inexpensive and operational flexibility were among the reasons resulting to an exponential increase of drone usage by civil society apart from military applications [4]. Suspected sighted drones like the one flying above Chancellor Merkel by pirate party in Sep, 2013 and many other sighted drones near France nuclear plants [5], can be posing a security challenge that makes drone detection an issue of concern. Drone usage for transporting contraband materials like drugs and weapons between Mexico borders [6], and other recently reported security threats of sighted un-authorized flying drones [7] may be a global threats necessitating drone's detection apart from unauthorized imaging and filming in restricted areas, illegal surveillance, air collision, drugs smuggle, terrorist attacks, RF jamming etc.
However, many reported attempt on drone detection by using different methodologies were presented. These include a camera based method [8], acoustic in [9] and [10], hybrid in [4], radio frequency (RF) in [11], shooting and netting in [9] and [12] yet, some false alarm and other background clutters were also reported. Radar systems as one of the pioneering methods widely used, explored many different topologies toward detecting the drone. The target size and the material make, which is usually a plastic or composite carbon, yielding low RCS thus making it difficult to be detected. The drone flying altitude may also be outside the coverage of conventional radar thus, became an issue of concern.
Subsequently, there was a least reported FSR geometry addressing airborne targets' detection apart from the work reported by [13], which predicted the FSR system airborne target surveillance response for both far- and near-field conditions. This may be due to the difficulty in achieving transmitter-target-receiver line of sight (LoS) been one of the major feature of FSR configuration. This paper investigated the feasibility of implementing the FSR system for drone detection through its generated micro Doppler. The remains of the paper contained some theoretical description about the two different FSR receiver systems in section 2. Performance analysis of the two different FSR receivers was investigated experimentally in section 3. Section 4 presented a verification of the effect of polarization on the propagated wave and the scattered signal as well as the maneuvering effect on detection. The paper was concluded with some suggestive measures on how best the result of the detected target can be improved.
Forward Scattering Radar (FSR) System
Forward scattering radar is a special bistatic radar mode that occurs when a bistatic angle is close to 180°. In FSR geometry, the target crossing between the transmitter and receiver blocked the EM wave travelling from the Tx-to-Rx. This formed a target's shadow (silhouette) irrespective of the material make of the target. The FSR minimized the effect of radar cross section (RCS) of target while detection [14,15]. The steep rise of the target's RCS irrespective of the target's shape and radar absorbing material (RAM) makes it popular over the traditional mono-static radar [1], instead FSR considers the target physical dimension and the wavelength during detection. Conventionally, radar consisted of some vital parameters and formed the backbone of detection. This includes the radar cross section (RCS), wavelength (λ), radar resolutions and the Doppler effects. Although details on their practical implication were presented in the subsequent chapters, some brief description was made.
FSR receiver system
Before the adaptation of the FSR setup, an attempt was made to verify an appropriate receiver combination that best fits the system and yield a better signal response. Comparison between IQ-mixer based receiver system and the diode-based was further conducted to investigate their performance in detection.
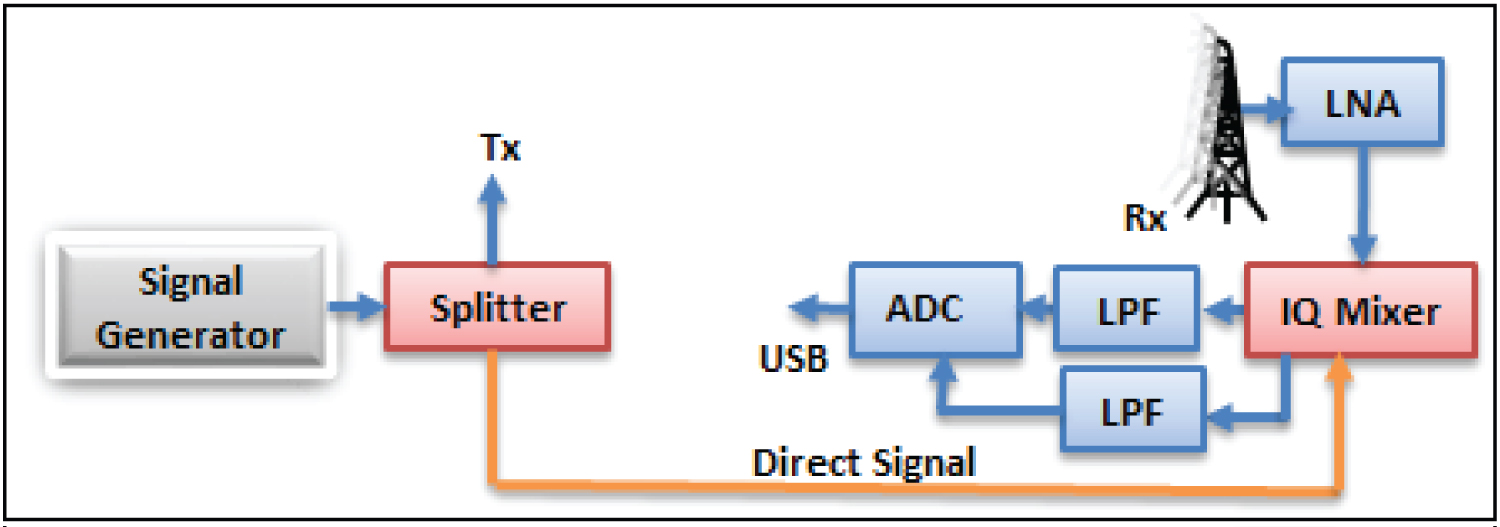
IQ-mixer based receiver: The first receiver configuration was based on IQ mixer at the receiving end, which accepts two different signal inputs i.e. the scattered signal by the target and direct signal from the receiver. This enabled the receiving system extracts the target's feature by making comparison between the two received signals. Figure 1 is the representation of the IQ-mixer based receiver setup.
In this configuration of Figure 1, the received signal has some element of direct signal component. If the corresponding scattered signal be
and the direct signal is represented by
From equation (1), the scattered signal Ssc(t) can similarly be represented as where A is the signal amplitude, fc is the carrier frequency and φ(t) phase modulation due to the target's motion. This target motion involved the motion due to the main body and the micro motion caused by a rotating blade. The corresponding "In-phase (I)" and "Quadrature (Q)" outputs undergo a low-pass filtering process before the analogue to digital conversion (ADC). The mixer input is a combination of both scattered and the direct signal. The mixer outputted two sets of signal with 90° phase shift between them [16] as represented below.
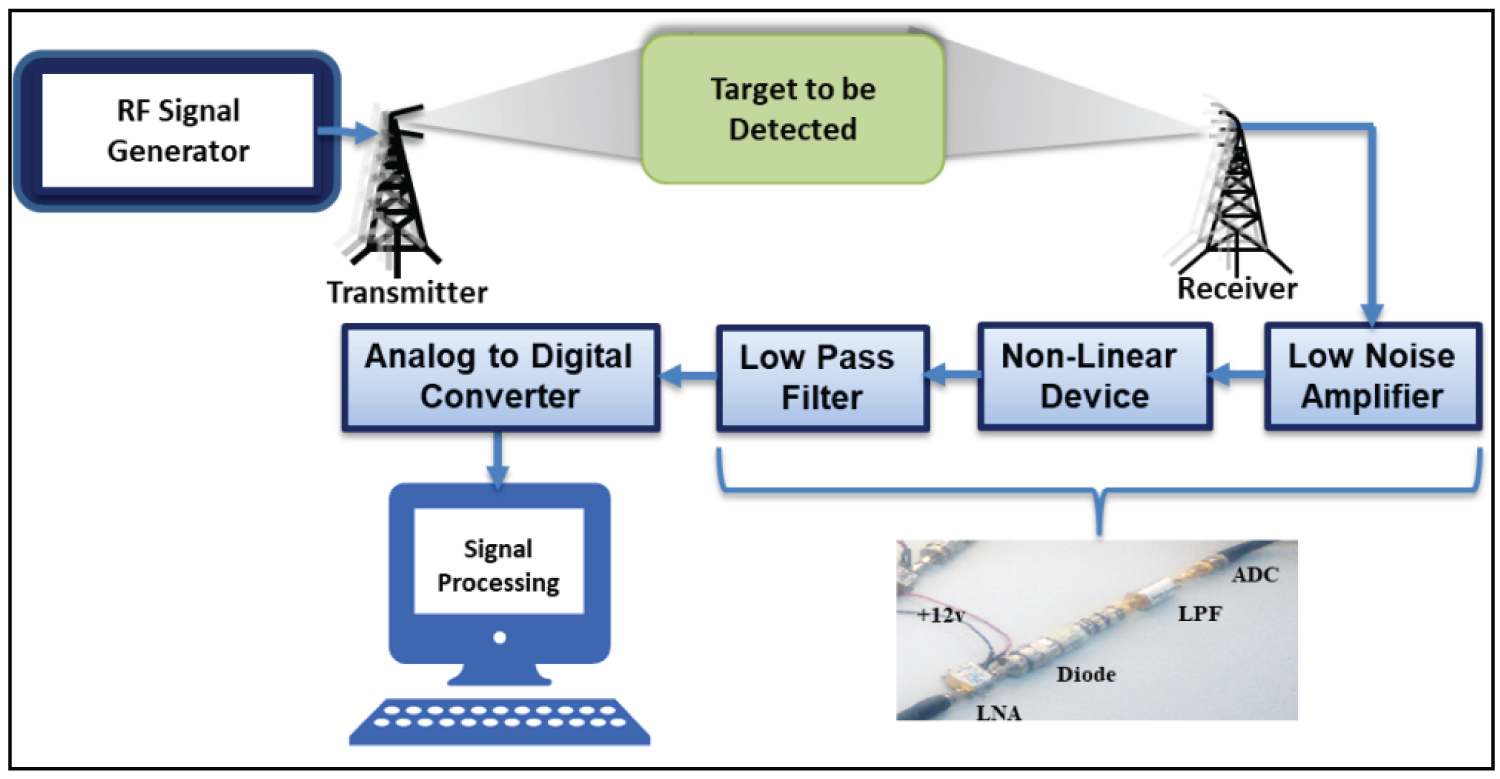
Diode based Receiver: The second scenario was by using a non-linear (diode) device at the receiving end, as shown in Figure 2. In this case, the transmitted signal (Stx) was reflected by the rotating blade and the target main body. Similarly, part of the transmitted signal directly travels to the receiving end. The target's silhouette in shadow form combined a direct signal and the scattered signal as received signal (Srx). A detailed received signal derivation was described in [17].
The non-linear device based FSR receiver has a simple circuit that does not require any synchronization channel; thus, contains only one receiving channel with a self-mixing technique using a non-linear amplitude detector called a diode. The signal was arriving the receiving antenna composed of a superposition of two signals, the direct path signal from the transmitter and the echoed signal by the target. The signal composition is directly fed into the low noise amplifier (LNA). The amplitude detector performed a demodulation process on the amplified signal from the LNA output and then extracted a low-frequency band from the phase-amplitude modulated signal. The low pass filter (LPF) outputted the low Doppler signal content and discarded the high-frequency component. This signal is saved on the PC for further processing. The receiving section of Figure 2, illustrated the hardware composition of the FSR receiver circuit.
To further compare the detection performance of these setups, some preliminary experiments were conducted by using a small rotating, reading table fan, having blade material and size, similar to the intending copter-drone which is usually plastic in nature or carbon composite material. Although the four-bladed fan has only one rotor, yet, it provided us with insightful information about how the signature response may look like, especially when compared with the already established signature of a helicopter main rotor.
Experimental Campaign
The experiment was conducted by using two different targets. It first considered using a table fan blade so as to be able to relate the rotating signature to that of the already established helicopter main rotor. The second scenario implemented the actual drone blades to investigate the radar returns for the 2-blade, 4-rotors copter-drone geometry.
Target detection
By using a reading-table fan blade, the possibility of detecting the target through the generated micro motions due to the rotating blades was investigated. This was considered important for its relatedness features to helicopter main rotor, whose signature was already established by other researchers. Another important thing to note was the blade's nature to that of the intending target (copter-drone). During the experiment, emphasis was given to the rotating blades' radar returns.
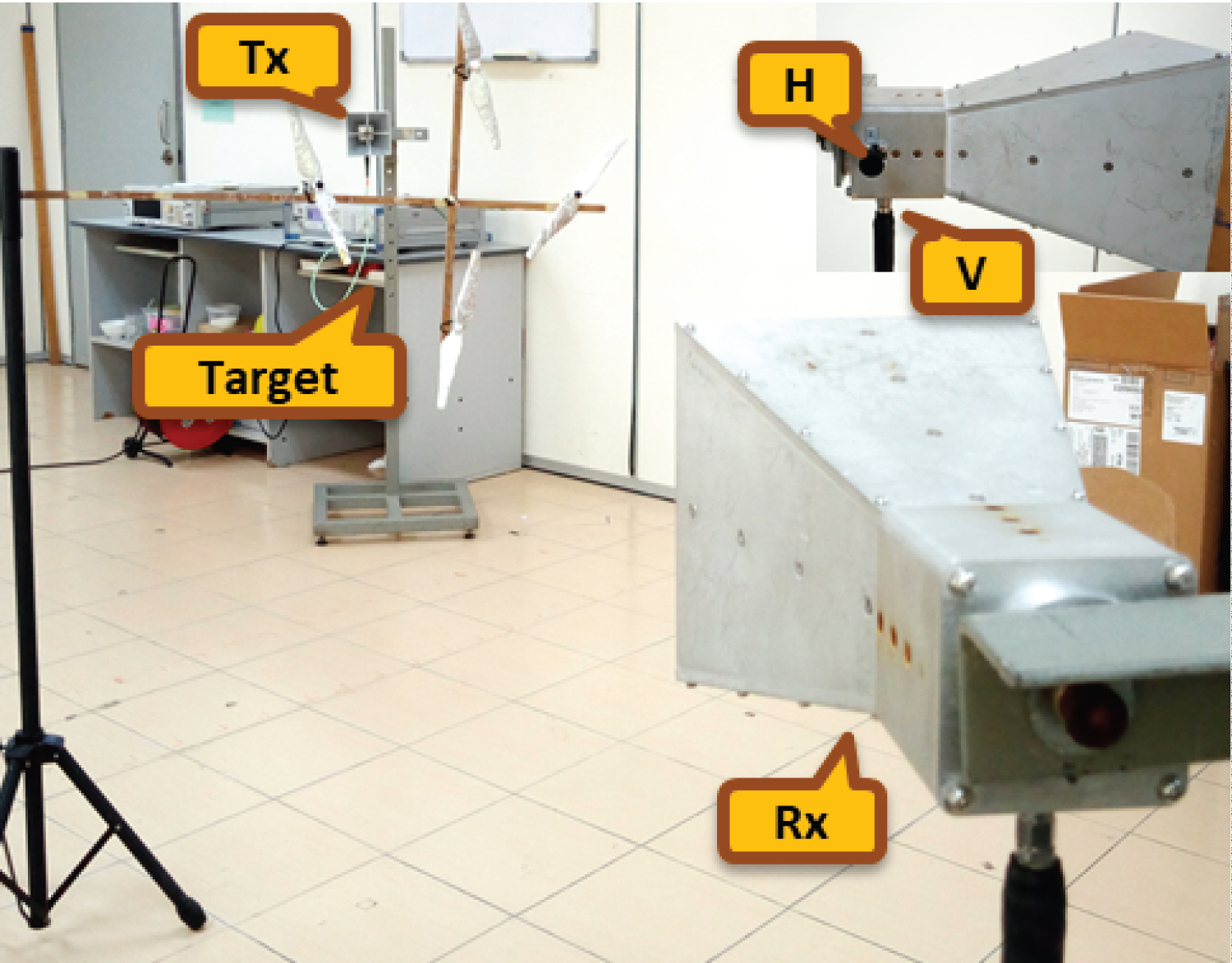
i. The rotating blade was made to be aligned horizontally reference to the baseline (Facing-Up) placed symmetrically between the transmitter and receiver.
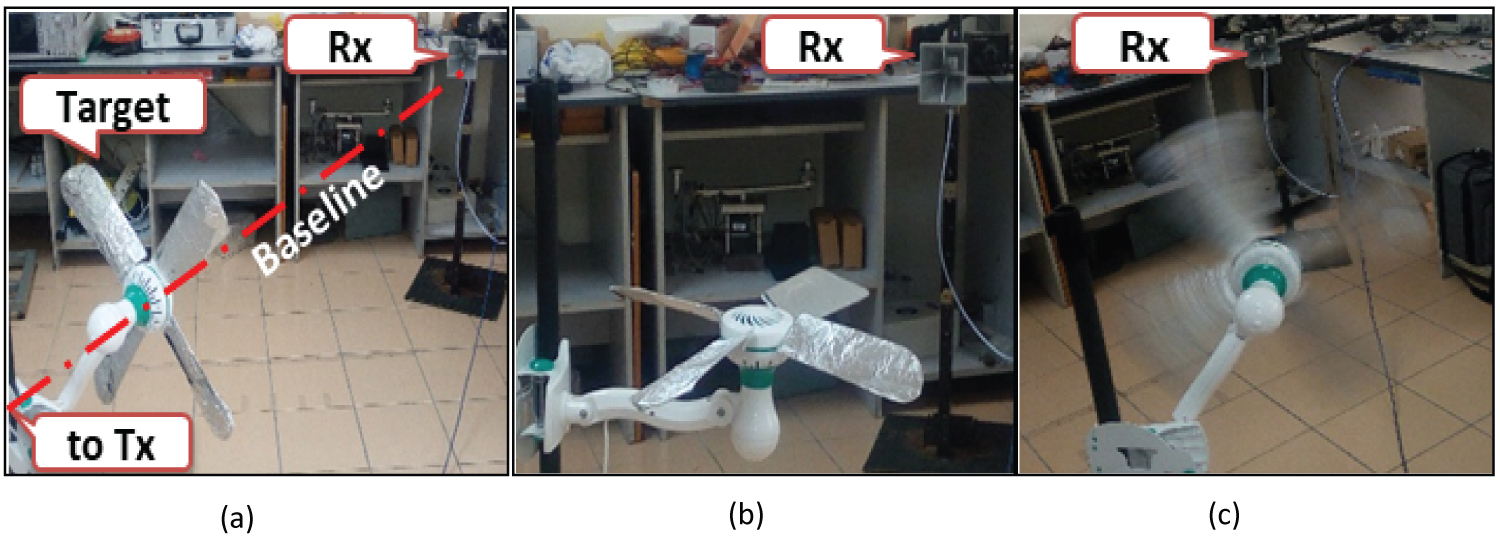
ii. The blade was vertically aligned to the baseline (Facing-receiver), placed equidistance between the transmitter-receiver baselines. Figure 3 shows both orientations used during the experiment.
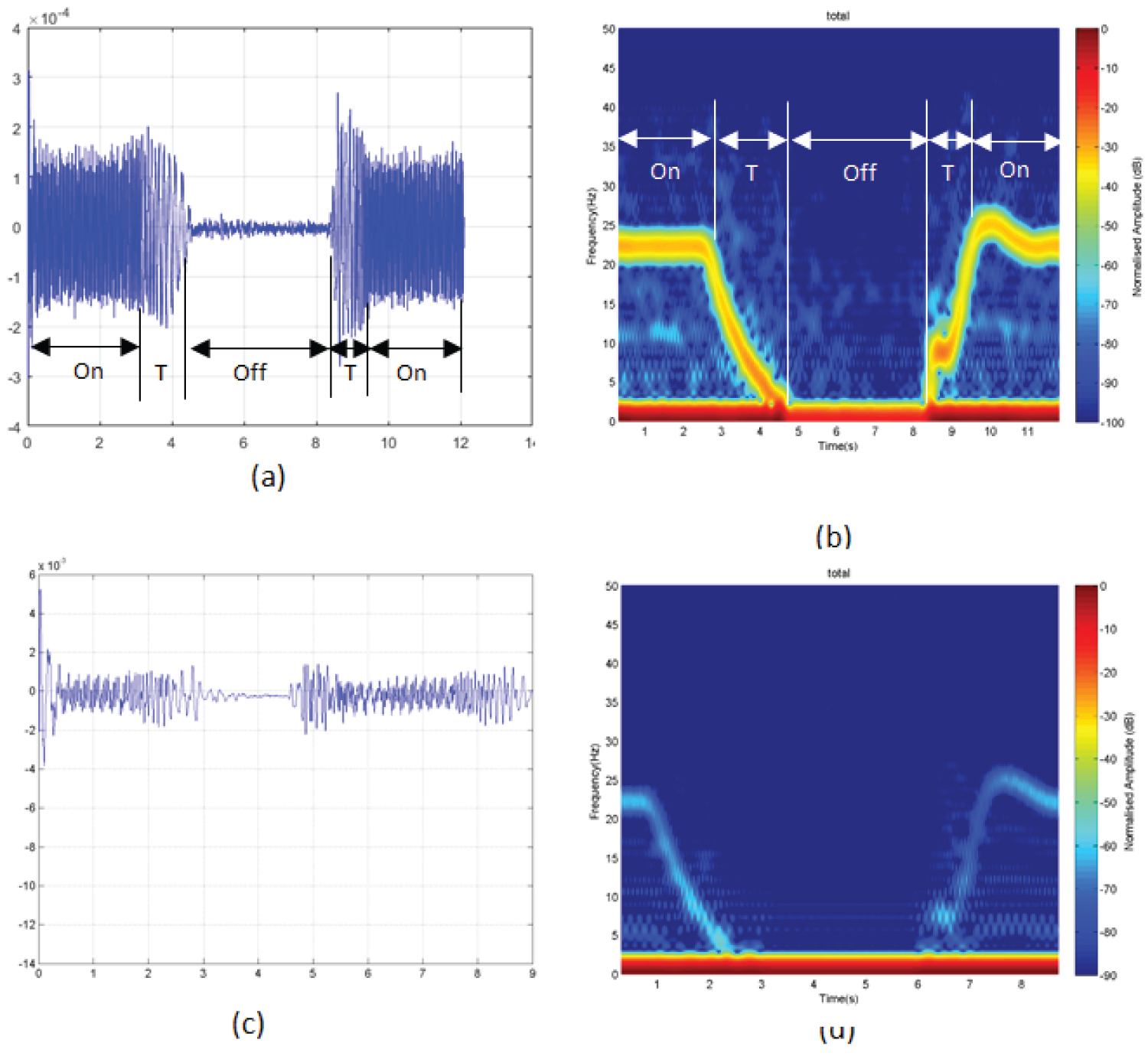
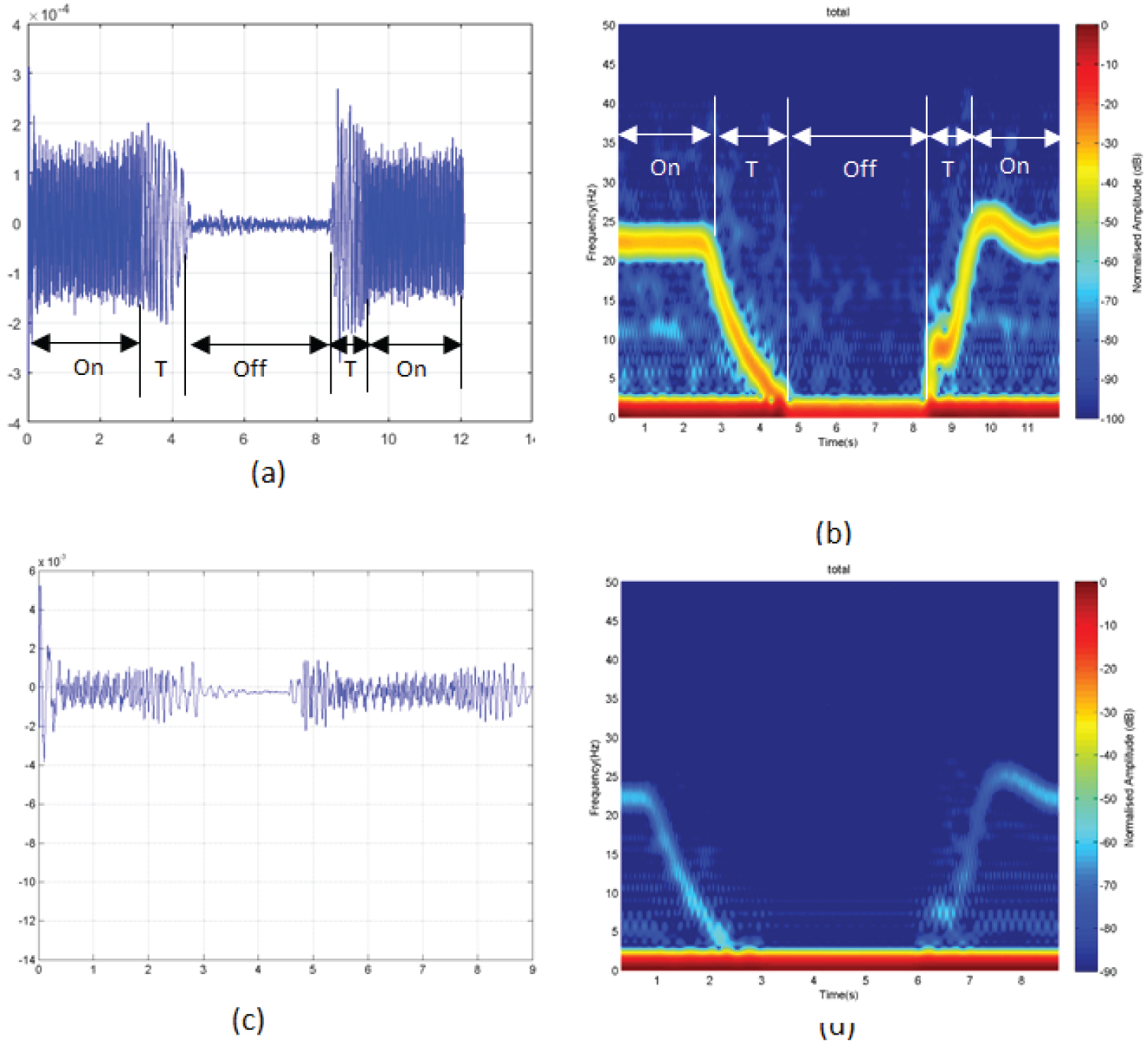
Figure 3, shows how a reading table fan was used as the target to detect its blade's micro-motions, in the experiment conducted. At first, the fan was put 'On' and placed on a fixed stand, close to the baseline as seen in Figure 3a. The micro-motions due to the rotating blades were made to scatter the signal travelling from the transmitter to the receiver, such that this can be used for the detection. The scenarios conducted include the blade facing-receiver and facing-up i.e (horizontally and vertically aligned, between the transmitter and the receiver). After noticing the effective look angle that yields a convincing signature, two scenarios that aligned the rotating blades horizontal to the baseline, i.e. 'Facing-up' (Figure 3b) and the vertically aligned blades to the baseline, i.e. 'Facing-receiver' (Figure 3c) scenarios were selected for further experiments. A total duration of 12sec was used to observe a 3-state (On-Off-On) signature of the blade. The fan was put 'On' for 4sec, then 'Off' for 4sec then 'On' again for another 4sec, to make a total observation time of 12sec. in between the 'On' and 'Off' states, a transition time 'T' was also observed Figure 4a and Figure 4b. By using a diode based receiver, 3 GHz transmitting frequency, 15 dBm transmitter power, the resultant signature of the fan blade was depicted in Figure 4.
Figure 4a and Figure 4b represented the blade signature due to 'Facing-rx', while Figure 4c and Figure 4d were the corresponding 'Facing-up' scenarios. The resultant signature showed a clear difference in the signal power intensity when the blade was vertically aligned, i.e. 'Facing-rx' as compared to the horizontally aligned, 'Facing-up' scenario. This clearly defined the effect of look angle in detection. Similarly, the same procedure was maintained, but this time, an IQ-mixer based receiver was used in the FSR system configuration, and the obtained signature was illustrated in Figure 5. For IQ mixer receiver, Figure 5a and Figure 5b represented the obtained signature due to Facing-receiver, while Figure 5c and Figure 5d was due to the Facing-up scenario. Based on the observed signature of Figure 4 and Figure 5 and apart from detection confirmation, it is clearly seen that the diode based FSR receiver system had a better performance thus, yielded a clearer signature. It is therefore concluded that the diode receiver circuit is more effective in the FSR geometry for this type of target; hence, the diode-based receiver circuit was adopted for the rest of the experiments conducted in this study.
After a successful detection despite the aforementioned challenges of the target blade and low RCS characteristics, we now used a drone-like rotating blade for this experiment. An actual copter-drone blade was used, improvised drone geometry but maintaining the same dimension of the actual Phantom 4 drone for the detection. In addition, an effort was also made to consider different polarization to investigate its effect on the detection. Figure 6 therefore presented the experimental setup.
Polarization effect on detection
Polarization plays an important role in the way electromagnetic wave travels, and considered essential for effective transmit-receive of the signal. The resonance characteristics of some targets like cylinders depend on their circumference and the incident polarization [18], despite the facts that small thin cylinders' resonance depends on their length. Polarization is characterized by the electromagnetic (EM) wave propagation and the nature of electric (e-field) and magnetic (m-field) field travelling behavior in a single direction usually perpendicular to one another. This perpendicular relation between the e-field and the m-field, is in the direction of the propagating plane wave [19], and can be linear, circular or elliptically polarized.
To investigate the polarization effect on the detection, a dual polarized, 2-18 GHz, 15 dB gain horn antenna was used to achieve a co-polarized horizontal-horizontal (HH) and vertical-vertical (VV) and cross-polarized horizontal-vertical (HV) and vertical-horizontal (VH) configuration to compare and assess their detection performance. In this case, a rotating blade was used as the target in FSR geometry, as shown in the system setup of Figure 6.
The experimental setup illustrated in Figure 6 was used to detect a rotating blade in FSR geometry by maintaining similar transmitting parameters used earlier. This investigated the effect of the improved features of the FSR geometry and the detection possibility of the rotating blades, considering the nature of the actual blade make (usually plastic or carbon fiber material) [20]. We used 3 GHz frequency for illustration purposes due to the experimental setup requirement of low elevation of transmitter and FSR receiver. This condition increases the clutter and noise at higher frequencies. Thus, the low frequency at 3 GHz is sufficient for this experiment.
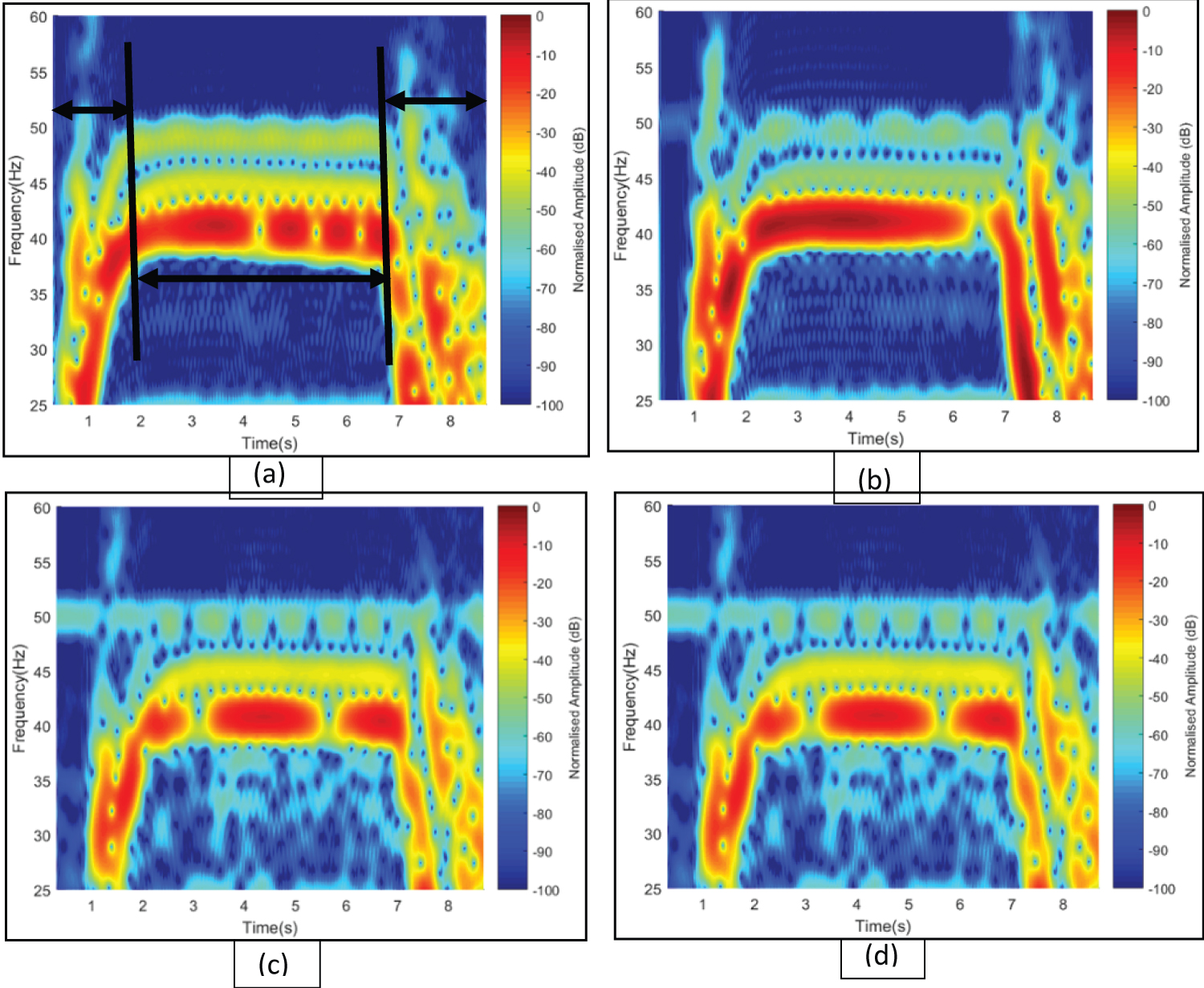
A commercial Phantom drone blade was used in this experiment, with a blade length of 12 cm. A 4-rotor, 2-bladed geometry of this actual copter-drone and parameters such as rotor speed, rotor spacing, number of blades etc. were considered; these can be seen in Figure 6. The blade was placed at the centre of a 4m transmitter-receiver baseline to face the receiver (this is the only scenario considered here due to its high impact on the received signature as confirmed from the previous experiment). A total observation time of 15sec was used to describe the detectability of the rotating blade, which was considered enough to record the 3-states "Off-On-Off" transition of the rotating blades. A clear signature description between the 'On' and 'Off' state of the blade and their corresponding transition states was noticed and presented in all cases. A portion of the raw received signal containing the blade signature was sampled as represented in Figure 7.
The blade was initially at 'Off' position, then switched 'On' and then 'Off' again for 5sec each. For clarity, a frequency window between 25-60 Hz was captured to display the Short Time Fourier Transform (STFT) representation of the blade signature of Figure 7. Although the signature of HH shown in Figure 7a was clearly defined, yet, an appreciable signature was noticed in both cases. The 3-bar representation of 4-rotors were all seen. The observed difference noticed between HH and VV especially with regards to low clutters and/or external noise, confirms the significant difference in RCS across all frequencies as predicted in [20]. The HH configuration yielded better resolutions due its consistent RCS, hence, became a better option in the subsequent experiments.
Maneuvering effects on detection
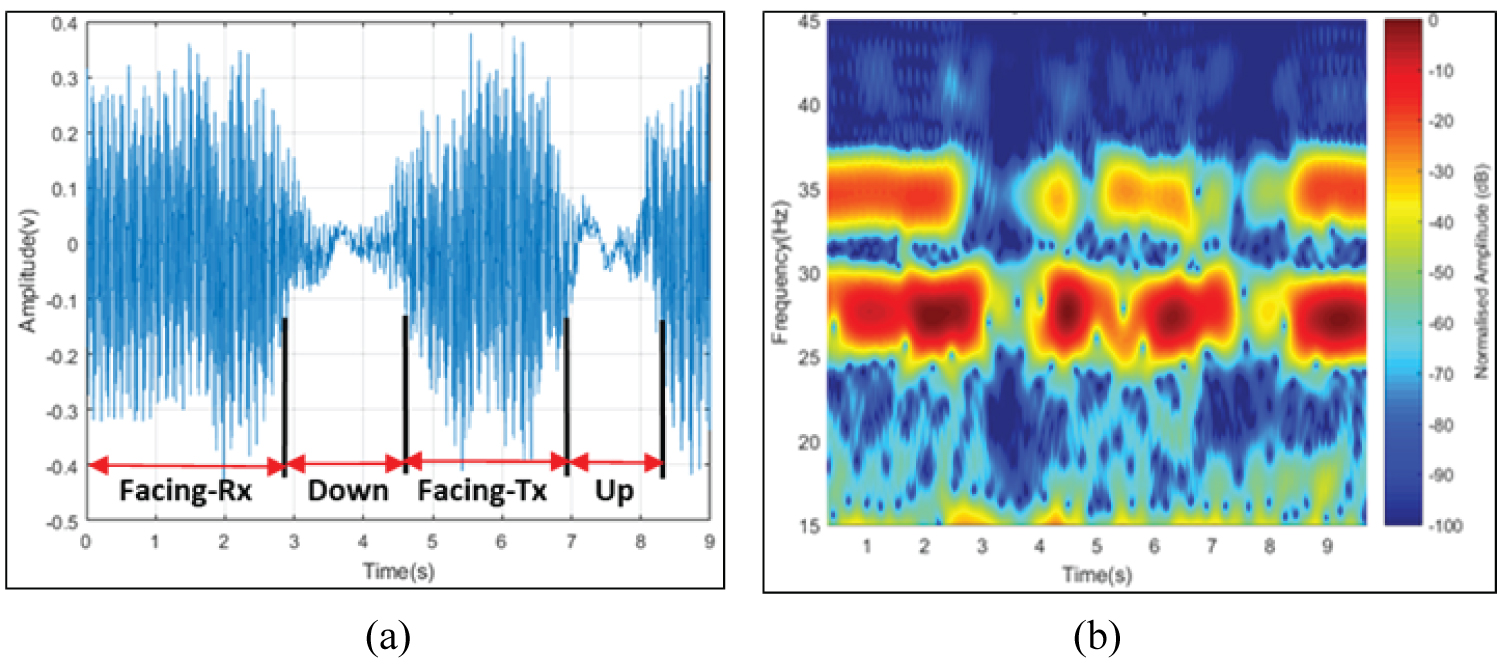
It is pertinent to note that the drone operational behavior may involve some unpredictable moves such as tilting, maneuvering etc. these will of course have an effect on the detection. Here, we consider detecting the drone through all angles i.e. 0° through 360°. The signature over 360° was observed and was presented in Figure 8.
At initial stage, the blade was made to be facing the receiver and rotating at an approximate speed of 36 rev/s i.e. 'On state' (see experimental setup of Figure 6). While in 'On state', the entire 4-rotors were turned slowly about a fixed position, in clockwise direction over a complete circle 0-2π. As seen in Figure 7, the first part of the signature represented the blade facing the receiver direction, turned by 90° to face down, then face the transmitter and finally faced up. It is observed that the signal power seems to have always be of higher intensity whenever the blades faced the receiver or transmitter, but degraded when facing up or down. The actual drone flight operation a can be recognized via this signature of the drone maneuvering motion.
Conclusion
In this paper, the feasibility of detecting a rotating copter-drone blade was investigated. Despite the blade nature, the signature of the micro motions due to the rotating blades was detected with a more cleared result for horizontal-horizontal (HH) arrangement. Prior to this, a reading table fan was also used to investigate the detection performance of two different FSR receiver setups thus selecting a better system setup. The change in signature behavior due to maneuvering motion was also investigated. The experimental result depicted how a generated micro-Doppler feature due to the rotating blades helps in detecting a copter-drone. The Facing-Rx orientation yielded a more clearly defined feature as compared to the horizontally aligned (Facing-Up) arrangement. For the polarization effect, a horizontal-horizontal (HH) configuration offered more compatibility with the intending target than its counterpart. It is therefore concluded that a copter-drone can be detected via its micro-Doppler due to rotating blades signature.
Funding
This research did not receive any grant from funding agencies in the public, commercial, or not-for-profit sectors.
Conflicts of Interest
The Authors declare no conflict of interest.
References
- Abdullah R, Ismail A (2006) Forward scaterring radar: Current and future applications. Int J Eng Technol 3: 61-67.
- Clemente C, Soraghan JJ (2012) Passive bistatic radar for helicopters classification: A feasibility study in IEEE National Radar Conference - Proceedings, 0946-0949.
- Petrides P, Kyrkou C, Kolios P, et al. (2017) Towards a holistic performance evaluation framework for drone-based object detection. In: International Conference on unmanned aircraft systems (ICUAS) IEEE Conference Publication, 1785-1793.
- Ganti SR, Yoohwan K (2016) Implementation of detection and tracking mechanism for small UAS. In: International Conference on Unmanned Aircraft Systems (ICUAS) 1254-1260.
- Busset J, Perrodin F, Wellig P, et al. (2015) Detection and tracking of drones using advanced acoustic cameras. SPIE 1-8.
- Osamu T (2017) RF Techniques for Detecting and Classifying UAV in 5th Smart city (SMC) workshop proceedings UPM Malaysia, 1-15.
- Diego S, Mich I (2017) Drones Threats.
- Liu H, Zhiqiang W, Yitong C, et al. (2017) Drone detection based on an audio-assisted camera array, in 3rd International Conference on Multimedia Big Data. 1-5.
- Mezei J, Flaska V, Molnár A (2015) Drone sound detection in 16th IEEE International Symposium on Computational Intelligence and Informatics 333-338.
- Nijim M, Mantrawadi N (2016) Drone classification and identification system by phenome analysis using data mining techniques, in IEE Conference Publication, 1-5.
- Nguyen P, Ravindranathan M, Nguyen A, et al. (2016) Investigating cost-effective rf-based detection of drones, in 2nd Workshop on micro aerial vehicle networks, systems, and applications for civilian use, Dro Net 17-22.
- Schulman B, Affairs L, Cornblatt M (2014) How to shoot down a Drone.
- Falconi MT, Comite D, Galli A, et al. (2017) Forward scatter radar for air surveillance: Characterizing the target-receiver transition from far-field to near-field regions, Remote Sens 9: 1-22.
- De Luca, Daniel L, Kabakchiev K, et al. (2015) Maritime FSR with moving receiver for small target detection, in International Radar Symposium 834-839.
- Pieraccini M, Miccinesi L, Rojhani N (2019) A Doppler range compensation for step-frequency continuous-wave radar for detecting small UAV. Sensors 19: 1-16.
- Chen VC (2011) The micro-Doppler effect in radar. Boston, London: Artech House Boston, London.
- Surajo M, Abdullah RR, Sali A, et al.(2019) Low-Slow-Small ( LSS ) Target detection based on micro Doppler analysis in forward scattering. Sensors 19: 1-20.
- Barton DK (2004) Radar System Analysis and Modelling. Artech House radar library.
- G'llaume R (2021) Polarization of plane waves polarization.
- Ritchie M, Fioranelli F, Griffiths H, et al. (2015) Micro-Drone RCS analysis, in IEEE Radar Conference, 452-456.
- Sathyamoorthy D (2015) A Review of security threats of unmanned aerial vehicles and mitigation steps. J Def Secur 6: 81-97.
Corresponding Author
Surajo Alhaji Musa, Electrical Electronic Engineering Dept, Federal Polytechnic Daura, Katsina Nigeria; Department of Computer and Communication Engineering, University Putra Malaysia, Malaysia.
Copyright
© 2022 Musa SA, et al. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.